Boost Controller
Contents
Boost Controller#
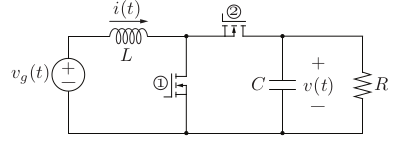
Averaged Inductor Current and Capacitor Voltage#
Volt-Seconds
\[\begin{align*}
\langle v_{L}(t)\rangle = L\frac{d}{dt} \langle i(t)\rangle &=
\bigg[\bigg(\langle{v_g}(t)\rangle-\langle i(t)\rangle R_{on} \bigg)d(t) + \bigg( \langle{v_g}(t)\rangle-\langle i(t)\rangle R_{on} - \langle v(t)\rangle \bigg)d'(t) \bigg] \\[0.5em]
\langle v_{L}(t)\rangle = L\frac{d}{dt} \langle i(t)\rangle &=
\bigg[\langle{v_g}(t)\rangle-\langle i(t)\rangle R_{on} - \langle v(t)\rangle d'(t) \bigg] \\[0.5em]
\frac{d}{dt} \langle i(t)\rangle &=
\begin{matrix}
\dfrac{1}{L} \\[1em]
\end{matrix}
\bigg[\langle{v_g}(t)\rangle-\langle i(t)\rangle R_{on} - \langle v(t)\rangle d'(t) \bigg] \\[0.5em]
\end{align*}\]
Charge Balance
\[\begin{align*}
\langle i_C (t) \rangle =
C\frac{d}{dt} \langle v(t)\rangle &=
\bigg[\bigg(\dfrac{-\langle v(t)\rangle}{R}\bigg)d(t) +\bigg(\langle i(t)\rangle -\frac{\langle v(t)\rangle}{R} \bigg)d'(t)\bigg] \\[1em]
\langle i_C (t) \rangle =
C\frac{d}{dt} \langle v(t)\rangle &=
\bigg[\dfrac{-\langle v(t)\rangle}{R} + \langle i(t)\rangle d'(t) \bigg] \\[1em]
\frac{d}{dt} \langle v(t)\rangle &=
\begin{matrix}
\dfrac{1}{C} \\[1em]
\end{matrix}
\bigg[\dfrac{-\langle v(t)\rangle}{R} + \langle i(t)\rangle d'(t) \bigg] \\[1em]
\end{align*}\]
Differential Solution
x =
(2)#\[\begin{bmatrix}
\langle i(t)\rangle \\
\langle v(t)\rangle
\end{bmatrix}\]
u =
(3)#\[\begin{bmatrix}
d(t) \\
\langle v_g(t)\rangle
\end{bmatrix}\]
\[\begin{align*}
\dot{x} &= f(x(t),u(t)) = \dfrac{d}{dt}
\begin{bmatrix}
\langle i(t)\rangle \\[1em]
\langle v(t)\rangle
\end{bmatrix} =
\begin{matrix}
\dfrac{1}{L} \\[0.5em]
\dfrac{1}{C}
\end{matrix}
\begin{bmatrix}
\langle{v_g}(t)\rangle-\langle i(t)\rangle R_{on} - \langle v(t)\rangle d'(t) \\[1em]
\dfrac{-\langle v(t)\rangle}{R} + \langle i(t)\rangle d'(t)s
\end{bmatrix} \\[0.5em]
\end{align*}\]
Linearized Small-Signal Model#
Derive a linearized small-signal model
\[\begin{align*}
\dot{\hat{x}}(t) &\approx A \hat{x}(t) + B \hat{u}(t) \\[0.5em]
\hat{y}(t) &= C \hat{x}(t) + E \hat{u}(t)
\end{align*}\]
where
(4)#\[\begin{matrix}
x(t) = \hat{x}(t) + X && X =
\begin{bmatrix}
I \\
V
\end{bmatrix} \\[0.5em]
u(t) = \hat{u}(t) + U && U =
\begin{bmatrix}
D \\
V_g
\end{bmatrix}
\\[0.5em]
\end{matrix}\]
Volt-Seconds (Large Signal)
\[\begin{align*}
\langle v_{L}(t)\rangle &= L\frac{d}{dt} \langle i(t)\rangle =
\bigg[\langle{v_g}(t)\rangle-\langle i(t)\rangle R_{on} - \langle v(t)\rangle d'(t) \bigg] = 0\\[0.5em]
0 &= V_g - I R_{on} - VD' \\[0.5em]
VD' &= V_g - I R_{on} \\[0.5em]
V &= \dfrac{V_g - I R_{on}}{D'} \bigg|_{I = \dfrac{V}{D'R} } \\[0.5em]
V &= \dfrac{V_g - \dfrac{V}{D'R} R_{on}}{D'} \\[0.5em]
V &= \dfrac{V_g}{D'}\cdot \dfrac{1}{1+\dfrac{ R_{on}}{D'^2 R}} \\[0.5em]
\end{align*}\]
Charge Balance (Large Signal)
\[\begin{align*}
\langle i_C (t) \rangle &=
C\frac{d}{dt} \langle v(t)\rangle =
\bigg[\dfrac{-\langle v(t)\rangle}{R} + \langle i(t)\rangle d'(t) \bigg] = 0\\[1em]
0 &=\dfrac{-V}{R} + I D' \\[1em]
I &= \dfrac{V}{D'R} \\[1em]
I &= \dfrac{1}{D'R}\cdot \frac{V_g}{D'}\cdot \dfrac{1}{1+\dfrac{ R_{on}}{D'^2 R}} \\[1em]
I &= \frac{V_g}{D'^2 R}\cdot \dfrac{1}{1+\dfrac{ R_{on}}{D'^2 R}} \\[1em]
\end{align*}\]
Find A, B, C, D
\[\begin{align*}
A = \dfrac{d}{d\hat{x}(t)} f(x(t),u(t))\bigg|_{x=X,u=U} &=
\begin{bmatrix}
\ \ \dfrac{\partial f_1}{\partial x_1} & \dfrac{\partial f_1}{\partial x_2} \ \ \\[1em]
\ \ \dfrac{\partial f_2}{\partial x_1} & \dfrac{\partial f_2}{\partial x_2} \ \
\end{bmatrix}\bigg|_{x,u} =
\begin{bmatrix}
\dfrac{\partial f_1}{\partial \langle \hat{i}(t)\rangle} & \dfrac{\partial f_1}{\partial \langle \hat{v}(t)\rangle} \\[1em]
\dfrac{\partial f_2}{\partial \langle \hat{i}(t)\rangle} & \dfrac{\partial f_2}{\partial \langle \hat{v}(t)\rangle}
\end{bmatrix}\bigg|_{x,u} \\[1em]
A &=
\begin{bmatrix}
\dfrac{-R_{on}}{L} & \dfrac{-D'}{L} \\[1em]
\dfrac{D'}{C} & \dfrac{-1}{RC}
\end{bmatrix} \\[1em]
\end{align*}\]
\[\begin{align*} B = \dfrac{d}{d\hat{u}(t)} f(x(t),u(t))\bigg|_{x=X,u=U} &=
\begin{bmatrix}
\dfrac{\partial f_1}{\partial u_1} & \dfrac{\partial f_1}{\partial u_2} \\[1em]
\dfrac{\partial f_2}{\partial u_1} & \dfrac{\partial f_2}{\partial u_2}
\end{bmatrix}\bigg|_{x,u} =
\begin{bmatrix}
\dfrac{\partial f_1}{\partial \hat{d'}(t)} & \dfrac{\partial f_1}{\partial \langle \hat{v_g}(t)\rangle} \\[1em]
\dfrac{\partial f_2}{\partial \hat{d'}(t)} & \dfrac{\partial f_2}{\partial \langle \hat{v_g}(t)\rangle}
\end{bmatrix}\bigg|_{x,u} \\[1em]
B &=
\begin{bmatrix}
\dfrac{V}{L} & \dfrac{1}{L} \\[1em]
\dfrac{-I}{C} & 0
\end{bmatrix} =
\begin{bmatrix}
\dfrac{V_g}{D'L}\cdot \dfrac{1}{1+\dfrac{ R_{on}}{D'^2 R}} & \dfrac{1}{L} \\[1.5em]
\dfrac{-V_g}{D'^2 RC}\cdot \dfrac{1}{1+\dfrac{ R_{on}}{D'^2 R}} & 0
\end{bmatrix} \\[1em]
\end{align*}\]
C =
(5)#\[\begin{bmatrix}
0 & 1 \\
1 & 0
\end{bmatrix}\]
E =
(6)#\[\begin{bmatrix}
0 & 0 \\
0 & 0
\end{bmatrix}\]
System Outputs in Frequency Domain#
\[\begin{align*}
\dot{\hat{x}}(t) &= A \hat{x}(t) + B \hat{u}(t) \\[0.5em]
\dot{\hat{y}}(t) &= C \hat{x}(t) + D \hat{u}(t) \\[0.5em]
\text{Laplace Transform } &\\[0.5em]
s\hat{x}(s) &= A \hat{x}(s) + B \hat{u}(s) \\[0.5em]
sI\hat{x}(s) - A \hat{x}(s) &= B \hat{u}(s) \\[0.5em]
\hat{x}(s) &= \left(sI-A\right)^{-1}B \hat{u}(s) \\[0.5em]
\hat{y}(s) &= \bigg(C(sI-A)^{-1}B +E \bigg)\hat{u}(s) = G(s) \hat{u}(s)
\end{align*}\]
Solver
G(s) =
(7)#\[\begin{bmatrix}
G_{id}(s) & G_{ig}(s) \\[1em]
G_{vd}(s) & G_{vg}(s)
\end{bmatrix}\]
(8)#\[\begin{bmatrix}
\dfrac{D'RV_g}{D'^2R + R_{on}}\dfrac{(CRs + 2)}{(LCRs^2 + RR_{on}Cs + Ls + D'^2R +R_{on})} & \dfrac{RCs + 1}{LCRs^2 + RR_{on}Cs + Ls + D'^2R +R_{on}} \\[1em]
\dfrac{RV_g}{D'^2R + R_{on}}\dfrac{(D'^2R - R_{on}-Ls)}{(LCRs^2 + RR_{on}Cs + Ls + D'^2R +R_{on})} & \dfrac{D'R}{LCRs^2 + RR_{on}Cs + Ls + D'^2R +R_{on}}
\end{bmatrix}\]
Transfer Function |
Description |
|---|---|
\(G_{id}(s)\) |
Small signal output current to duty ratio |
\(G_{ig}(s)\) |
Small signal output current to supply voltage |
\(G_{vd}(s)\) |
Small signal output voltage to duty ratio |
\(G_{vg}(s)\) |
Small signal output voltage to supply voltage |